
 平台热线
平台热线




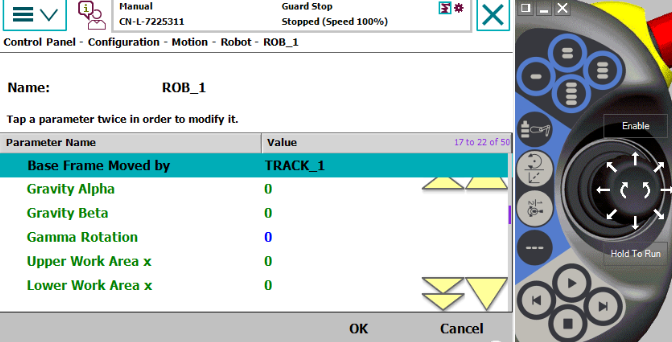
1. 默认配置机器人在导轨上时,机器人的base坐标系,大地坐标系,导轨的坐标系均在一起,默认导轨沿着大地坐标系的X方向。若机器人要与导轨联动,在示教器的motion-robot配置处,base frame Moved by选择导轨名字。
2. 若机器人与导轨如下图安装,即机器人base绕着大地坐标系的Z轴旋转了90度(默认导轨方向不变,依旧与大地坐标系的X平行),如何设置。

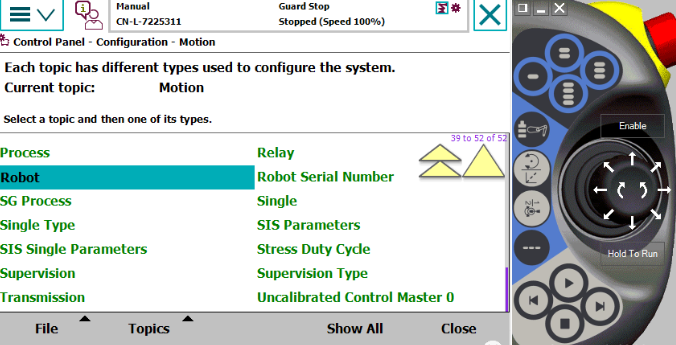
进入控制面板-配置-motion-robot,将机器人base坐标系的四元数修改如下

同时修改Gamma Rotation参数如下(即π/2)
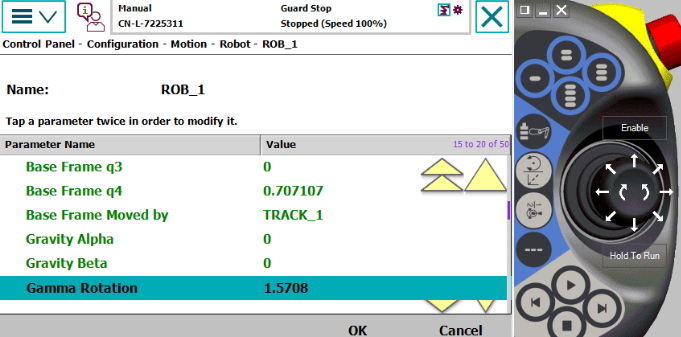
若机器人绕着大地的Z旋转-90度,则四元数如下:q1-q4:[-0.707,0,0,0.707],Gamma Rotation参数-1.5708
